সার্ভো সিস্টেম বুঝার জন্য আমরা অটোমেটিক কার কন্ট্রোল বিবেচনা করতে পারি। কার যখন পাহাড়ের উপর উঠে কন্ট্রোলার তখন ধীর গতি সেন্স করে এবং আরও টর্কের প্রয়োজনীয়তা অনুভব করে।
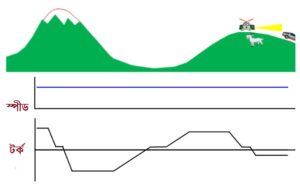
কন্সটেন্ট স্পীড মেইনটেইন করতে হলে কন্ট্রোলার ইঞ্জিনে আরও ফুয়েল বাড়ায় এবং পাহাড়ের উপরে উঠতে শুরু করে। যখন কার পাহাড় থেকে নিচের দিকে নামে তখন সেন্সর উচ্চ গতি সেন্স করে এবং ইঞ্জিনে ফুয়েল কমিয়ে দেয় গ্রেভেটি ফোর্সের কারণে এবং কন্সটেন্ট স্পীড মেইনটেইন করে।
রিয়াল টাইম ফিডব্যাক ব্যবহার করে কারের কন্সটেন্ট স্পীড মেইনটেইন করা হয় ইঞ্জিনে ফুয়েল ইনজেকশন কমবেশি করে। এটিকে স্পীড কন্ট্রোল লুপ বলে। সার্ভো ড্রাইভে ফিডব্যাক ব্যবহার করে মোটরের অপারেশন এডজাস্ট করা হয়।
সিস্টেম কম্পোনেন্টঃ

মোশন কন্ট্রোল সিস্টেম দরকার যখন বিভিন্ন অ্যাপ্লিকেশনে ভিন্ন মোশনে মোটর ঘুরানোর প্রয়োজন হয়।
মোশন কন্ট্রোল সিস্টেমের ৬টি বেসিক পার্ট আছে;
১। HMI
২। পিএলসি
৩। মোশন কন্ট্রোলার
৪। ড্রাইভ ইউনিট
৫। মোটর
৬। ফিডব্যাক এনকোডার
১। HMI:

HMI বা অপারেটর ইন্টার্ফেস মোশন সিস্টেমকে বিভিন্ন কমান্ড দেয় যেমন- স্টার্ট, স্টপ, স্পীড পরিবর্তন, ডিরেকশন পরিবর্তন ইত্যাদি। কিছু কিছু অ্যাপ্লিকেশনে অপারেটর ইন্টার্ফেস নাও ব্যবহার হতে পারে।
২। পিএলসিঃ

এটি HMI বা অপারেটর ইন্টার্ফেস এবং মোশন কন্ট্রোলার উভয়কে সাপোর্ট দেয়। পিএলসি মোশন সিস্টেমের অন্যান্য সেন্সর রিড করতে পারে এবং মোশন কন্ট্রোল প্রোগ্রামে স্ট্যাটাস পাঠায়।
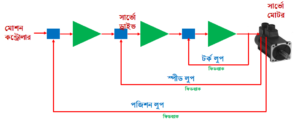
৩। মোশন কন্ট্রোলারঃ

মোশন কন্ট্রোলারে এমনভাবে প্রোগ্রাম করা থাকে যা প্রয়োজনীয় ইলেক্ট্রিক্যাল সিগন্যাল জেনারেট করে কাঙ্ক্ষিতভাবে মোশন কন্ট্রোল করে। প্রসেস ইকুইপমেন্ট চালানোর মতো এর যথেষ্ট পাওয়ার নাই। এটি শুধু লো লেভেল সিগন্যাল ড্রাইভে পাঠায়। ড্রাইভে অধিক পাওয়ার থাকে এবং মোশন কন্ট্রোলারের সিগন্যাল অনুযায়ী মোটর/একচুয়েটরকে ড্রাইভ করে। মোশন কন্ট্রোলার আলাদা স্ট্যান্ড-এলন ইউনিট অথবা পিএলসির সাথে অ্যাটাচড থাকতে পারে।
৪। ড্রাইভ ইউনিটঃ

সার্ভো ড্রাইভ বা এসি ড্রাইভ লো লেভেল কন্ট্রোলার সিগন্যালকে হাই পাওয়ারে রূপান্তরিত করে মোটর/একচুয়েটরকে ফিজিক্যালি মোভ করায়। ড্রাইভ এখানে ফিডব্যাক এনকোডার সিগন্যাল রিড করে মোটর সিগন্যাল মোডিফাই করে কাঙ্ক্ষিত মোশন প্রোফাইল এচিভ করে।
৫। মোটর/একচুয়েটরঃ
সাধারণত দুই রকম মোটর বেশি ব্যবহৃত হয়; এসি মোটর এবং সার্ভো মোটর।
কিরকম মোশন দরকার এবং অ্যাপ্লিকেশনের মেকানিক অনুযায়ী মোটর সিলেক্ট করতে হয়।
এসি মোটরঃ
এসি মোটরের পজিশন, এক্সিলারেশন, স্পীড এবং টর্ক ফ্রিকুয়েন্সি ভেরি করে কন্ট্রোল করা হয়। মোশন কন্ট্রোলার প্রয়োজনীয় সিগন্যাল ড্রাইভে পাঠায়। এসি ড্রাইভকে ভেরিয়েবল ফ্রিকুয়েন্সি ড্রাইভ বা ইনভার্টারও বলে। এসি মোটর ইন্ডাস্ট্রিয়াল অ্যাপ্লিকেশনে ব্যবহৃত হয় যেখানে হাই আরপিএম স্পীড কন্ট্রোল দরকার। মিক্সার, ফ্যান, রোটারি করাত, কনভেয়ার, সেন্ট্রিফিউগাল পাম্প ইত্যাদি অ্যাপ্লিকেশনে এসি ড্রাইভ ব্যবহার করা হয়।
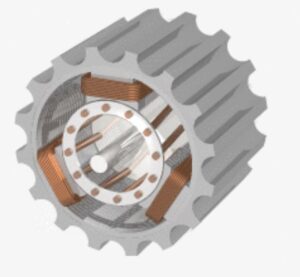
সার্ভো মোটরঃ

এসি সার্ভো মোটর অনেকটা ডিসি ব্রাশলেস মোটরের মতো। এতে পেঁচানো কয়েল এবং স্থায়ী চুম্বক উভয়ই থাকে। সার্ভো সাধারণত ফ্রিকুয়েন্সি, কারেন্ট এবং মোটরের ফেজ এগুলো ভেরি করে কন্ট্রোল করা হয়। সার্ভো সাধারণত কমপ্যাক্ট, ফাস্ট, যথাযথ পজিশন কন্ট্রোল, মাল্টি এক্সিস কো-অর্ডিনেশন, হাই স্টার্টিং টর্ক দেয়। সার্ভো মোটর এক্সটার্নাল ফোর্সের বিপরীতে নির্দিষ্ট পজিশন হোল্ড করতে পারে।
৬। ফিডব্যাক এনকোডারঃ

সার্ভো মোটর ফিডব্যাক ডিভাইস যেমন এনকোডারের সাথে যুক্ত থাকে। এনকোডার মোটরের শাফটের পজিশন এঙ্গেল বা স্পীড ইনফর্মেশন কন্ট্রোলারে পাঠায়। এই ইনফর্মেশন ব্যবহার করে যথাযথভাবে মোটর শাফট পজিশন কন্ট্রোল করা যায়। মোটরের শাফট পজিশন এবং অপারেটিং কারেন্ট ফিডব্যাক নিয়ে টর্ক সঠিকভাবে কন্ট্রোল করা যায়।